- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Un artículo para entender la diferencia entre motores paso a paso y servomotores y servomotores.
I. Diferencias entre motores paso a paso y servomotores y servomotores
Motor paso a paso: es la señal de pulso eléctrico en desplazamiento angular o desplazamiento de línea de las piezas del motor paso a paso del elemento de control de bucle abierto. En pocas palabras, se basa en la señal de pulso eléctrico para controlar el ángulo y el número de vueltas. Por lo tanto, solo confía en la señal del pulso para determinar cuánta rotación. Como no hay sensor, el ángulo de parada puede variar. Sin embargo, la señal de pulso precisa minimiza la desviación.
Servomotor: confíe en el circuito de servocontrol para controlar la velocidad del motor, a través del sensor para controlar la posición de rotación. Por eso el control de posición es muy preciso. Y la velocidad de rotación también es variable.
Servo (Servo electrónico): El componente principal del servo es el servomotor. Contiene circuito de control de servomotor + conjunto de engranajes reductores. Ah, sí, el servomotor no tiene conjunto de engranajes reductores. Y el servo tiene un juego de engranajes reductores.
En el caso de un servo de límite, se basa en un potenciómetro debajo del eje de salida para determinar el ángulo de dirección del brazo del timón. El control de la señal del servo es una señal modulada por ancho de pulso (PWM), donde un microcontrolador puede generar fácilmente esta señal.
II. Principio básico del motor paso a paso
Cómo funciona:
Normalmente, el rotor de un motor es un imán permanente y cuando la corriente fluye a través de los devanados del estator, los devanados del estator producen un campo magnético vectorial. Este campo magnético hará que el rotor gire en un ángulo, de modo que la dirección del par de campos magnéticos del rotor será la misma que la dirección del campo magnético del estator. Cuando el campo magnético vectorial del estator gira en un ángulo. El rotor también gira formando un ángulo con este campo magnético. Por cada pulso eléctrico de entrada, el motor gira un paso angular hacia adelante. Su desplazamiento angular de salida es proporcional al número de pulsos de entrada y su velocidad de rotación es proporcional a la frecuencia de los pulsos. Al cambiar el orden en que se energizan los devanados, el motor se invierte. Por lo tanto, el número y la frecuencia de los impulsos y el orden de activación de los devanados de cada fase del motor se pueden controlar para controlar la rotación del motor paso a paso.
Principio de generación de calor:
Generalmente veo todo tipo de motores, los internos son núcleo de hierro y bobina de bobinado. La resistencia del devanado, la potencia producirá pérdida, el tamaño de la pérdida y la resistencia y la corriente es proporcional al cuadrado, lo que a menudo se conoce como pérdida de cobre, si la corriente no es la CC estándar o la onda sinusoidal, también producirá pérdida armónica; El núcleo tiene un efecto de corriente parásita de histéresis, en el campo magnético alterno también se producirá pérdida, el tamaño del material, la corriente, la frecuencia y el voltaje relacionados, lo que se llama pérdida de hierro. La pérdida de cobre y de hierro se manifestará en forma de generación de calor, afectando así la eficiencia del motor. Los motores paso a paso generalmente buscan precisión de posicionamiento y salida de par, la eficiencia es relativamente baja, la corriente es generalmente mayor y los componentes armónicos son altos, la frecuencia de la corriente alterna con la velocidad y el cambio, por lo que los motores paso a paso generalmente tienen una situación de calor, y la situación es más grave que el motor de CA general.
III. Construcción del timón
El servo se compone principalmente de una carcasa, una placa de circuito, un motor de accionamiento, un reductor de engranajes y un elemento de detección de posición. Su principio de funcionamiento es que el receptor envía una señal al servo, y el IC en la placa de circuito hace que el motor sin núcleo comience a girar, y la potencia se transmite al brazo oscilante a través del engranaje reductor y, al mismo tiempo, el detector de posición envía una señal para determinar si ha llegado al posicionamiento o no. El detector de posición es en realidad una resistencia variable. Cuando el servo gira, el valor de la resistencia cambiará en consecuencia y el ángulo de rotación se puede conocer detectando el valor de la resistencia. El servomotor general es un delgado cable de cobre enrollado alrededor de un rotor tripolar, cuando la corriente fluye a través de la bobina generará un campo magnético y la periferia del imán del rotor producirá repulsión, que a su vez genera la fuerza de rotación. Según la física, el momento de inercia de un objeto es directamente proporcional a su masa, por lo que cuanto mayor sea la masa del objeto a girar, mayor será la fuerza necesaria. Para lograr una velocidad de rotación rápida y un bajo consumo de energía, el servo está hecho de finos alambres de cobre trenzados en un cilindro hueco muy delgado, formando un rotor hueco muy liviano sin polos, y se colocan imanes dentro del cilindro, que es el motor de copa hueca.
Para adaptarse a diferentes entornos de trabajo, existen servos con diseños resistentes al agua y al polvo; y en respuesta a diferentes requisitos de carga, existen engranajes de plástico y metal para servos, y los engranajes metálicos para servos son generalmente de alto torque y alta velocidad, con la ventaja de que los engranajes no se astillarán debido a cargas excesivas. Los servos de mayor calidad estarán equipados con rodamientos de bolas para que la rotación sea más rápida y precisa. Hay una diferencia entre un rodamiento de bolas y dos rodamientos de bolas; por supuesto, los dos rodamientos de bolas son mejores. Los nuevos servos FET utilizan principalmente FET (transistor de efecto de campo), que tiene la ventaja de una baja resistencia interna y, por lo tanto, menos pérdida de corriente que los transistores normales.
IV. Principio de funcionamiento del servo.
Desde la onda pwm al circuito interno para generar un voltaje de polarización, el generador del contactor a través del engranaje reductor para hacer que el potenciómetro se mueva, de modo que cuando la diferencia de voltaje sea cero, el motor se detenga, para lograr el efecto de servo.
Los protocolos para los servos PWM son todos iguales, pero los últimos servos que aparecen pueden ser diferentes.
El protocolo es generalmente: ancho de alto nivel en 0,5 ms ~ 2,5 ms para controlar el servo para que gire en diferentes ángulos.
V. Cómo funcionan los servomotores
La siguiente figura muestra un circuito de control de servomotor fabricado con un amplificador operacional de potencia LM675, y el motor es un servomotor de CC. Como se puede ver en la figura, el amplificador operacional de potencia LM675 se suministra con 15 V, y el voltaje de 15 V se agrega a la entrada en fase del amplificador operacional LM675 a RP 1, y el voltaje de salida del LM675 se agrega a la entrada del servomotor. El motor está equipado con un generador de señales de medición de velocidad para la detección en tiempo real de la velocidad del motor. De hecho, el generador de señales de velocidad es una especie de generador y su voltaje de salida es proporcional a la velocidad de rotación. La salida de voltaje del generador G de señales de medición de velocidad se devuelve a la entrada inversora del amplificador operacional como una señal de error de velocidad después de un circuito divisor de voltaje. El valor de voltaje establecido por el potenciómetro de comando de velocidad RP1 se suma a la entrada en fase del amplificador operacional después de dividir el voltaje por R1.R2, que es equivalente al voltaje de referencia.
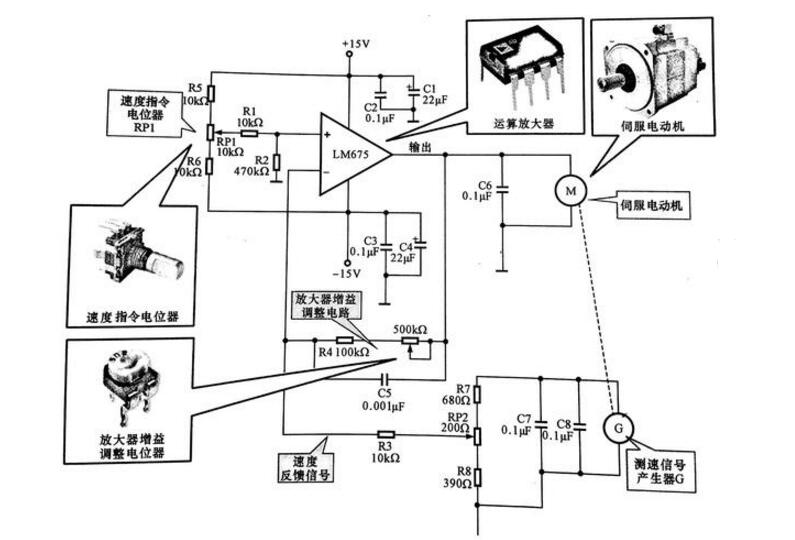
Esquema de control del servomotor.
Servomotor: Indicado con la letra M de servomotor, es la fuente de energía para el sistema de accionamiento. Amplificador operacional: indicado por el nombre del circuito, es decir, LM675, es una pieza amplificadora en el circuito de servocontrol que proporciona la corriente de accionamiento para el servomotor.
Potenciómetro de comando de velocidad RP1: establece el voltaje de referencia del amplificador operacional en el circuito, es decir, el ajuste de velocidad. Potenciómetro de ajuste de ganancia del amplificador RP2: Se utiliza en el circuito para ajustar la ganancia del amplificador y el tamaño de la señal de retroalimentación de velocidad, respectivamente.
Cuando cambia la carga del motor, también cambia el voltaje de retorno a la entrada invertida del amplificador operacional, es decir, cuando aumenta la carga del motor, la velocidad disminuye y el voltaje de salida del generador de señal de velocidad también disminuye, de modo que el voltaje en la entrada invertida del amplificador operacional disminuye, y la diferencia entre este voltaje y el voltaje de referencia aumenta, y el voltaje de salida del amplificador operacional aumenta. Por el contrario, cuando la carga se reduce y la velocidad del motor aumenta, el voltaje de salida del generador de señales de medición de velocidad aumenta, el voltaje de retroalimentación agregado a la entrada invertida del amplificador operacional aumenta, la diferencia entre este voltaje y el voltaje de referencia disminuye, el voltaje de salida del amplificador operacional disminuye y la velocidad del motor disminuye en consecuencia, de modo que la velocidad de rotación se puede estabilizar en el valor establecido automáticamente.